
 ×
× 
根據(jù)《制造業(yè)人才發(fā)展規(guī)劃指南》預(yù)測,2025 年,機器人與智能制造領(lǐng)域人才缺口將達(dá)到 450 萬。為實現(xiàn)中國制造由大變強的戰(zhàn)略任務(wù)提供堅實的人才支撐,從2016 年東南大學(xué)首次獲批“機器人工程”專業(yè)以來,近幾年時間里,全國高校“機器人工程”專業(yè)申報工作如火如荼,開設(shè)院校數(shù)量增長速度顯著。機器人工程是一個多維交叉,多學(xué)科融合的新學(xué)科,與各種專業(yè)都有關(guān)聯(lián)。機器人的結(jié)構(gòu)部分需要機械專業(yè)來完成,內(nèi)部電路涉及電氣等專業(yè),運動系統(tǒng)控制和感知規(guī)劃又與控制專業(yè)有關(guān),智能感知、決策方面又涉及計算機、人工智能專業(yè)知識,同時材料科學(xué)、力學(xué)等專業(yè)也與機器人工程息息相關(guān)。
目前國內(nèi)高校的機器人工程與智能制造工程專業(yè)的建設(shè)總體來看還處于起步階段,由于不同類型的高校在學(xué)科基礎(chǔ)和培養(yǎng)目標(biāo)等方面都存在較大差異,因此都需要探索適合自己的培養(yǎng)方案。機器人工程與智能制造工程專業(yè)都屬于“新工科”專業(yè),都具有一個最主要的特點就是多學(xué)科綜合,同時涉及系統(tǒng)設(shè)計與規(guī)劃、對象與過程建模、感知與認(rèn)知、計算與控制、通信與人機交互等多種技術(shù)環(huán)節(jié),需要機器人、工業(yè)工程、人工智能、大數(shù)據(jù)、云計算等關(guān)鍵技術(shù)的集成,涉及機械工程、、電子技術(shù)、控制科學(xué)與工程、計算機科學(xué)等多個學(xué)科。在培養(yǎng)學(xué)生的過程中,既要考慮學(xué)生學(xué)科基礎(chǔ)理論和方法的學(xué)習(xí)以有堅實的創(chuàng)新基礎(chǔ),還要考慮企業(yè)的現(xiàn)實需求,兼顧實際工作崗位的應(yīng)用實操能力的培養(yǎng)。
目前市場上的很多教學(xué)裝備尚難以滿足需求。以機器人工程專業(yè)所需的機器人教學(xué)實驗平臺為例:高職高專學(xué)生實操能力培養(yǎng)的機器人實驗平臺,以機器人集成工作站的機器人和 PLC 編程訓(xùn)練為主要內(nèi)容,培養(yǎng)機器人實操編程人員。這類系統(tǒng)對于研究性大學(xué)或兼顧研究和教學(xué)的本科院校就不適用。這些本科院校需要培養(yǎng)具有很強再創(chuàng)新能力的學(xué)生,需要學(xué)生對設(shè)備的運行原理有深入的理解,需要培養(yǎng)學(xué)生新算法設(shè)計、新應(yīng)用開發(fā)的能力。市售工業(yè)機器人主要面向工業(yè)應(yīng)用,控制器屬于封閉系統(tǒng),無法更改底層控制程序,無法部署自研的控制算法。雖然有一些工業(yè)機器人開放了部分接口,但出于安全、保密等多方面考慮,開放度并不高。有一些機器人開放了部分接口,但出于安全考慮,開放度不高。國外有些產(chǎn)品,但價格高昂,后期維護(hù)升級困難。
開放式機器人控制與仿真實驗室的建設(shè)可以支持學(xué)生認(rèn)知、操作性的工業(yè)機器人使用、應(yīng)用型編程,也可以支持學(xué)生理解性的機器人學(xué)、機器人控制系統(tǒng)原理學(xué)習(xí),還擁有豐富的視覺、力覺、人工智能擴展能力,支持?jǐn)?shù)字孿生仿真,用于創(chuàng)新性的機器人實驗場景設(shè)計、機器人賽項演練,形成認(rèn)知、理解、掌握、運用的學(xué)習(xí)過程閉環(huán)。
1)理論認(rèn)知
從機器人專業(yè)的理論知識出發(fā),掌握工業(yè)機器人在運動學(xué)、動力學(xué)方面的基礎(chǔ)理論和創(chuàng)新技術(shù)。
2)實踐實操
通過機器人教學(xué)平臺的建設(shè),在實訓(xùn)實踐中,對機器人學(xué)進(jìn)行實際運用,掌握工業(yè)機器人控制算法開發(fā)能力,提高學(xué)生實踐水平。
3)應(yīng)用集成
緊密結(jié)合工業(yè)智能制造核心技術(shù),結(jié)合視覺、力傳感進(jìn)行系統(tǒng)集成。在實訓(xùn)過程中了解機器人全方位的設(shè)計開發(fā)過程,系統(tǒng)化提升學(xué)生跨學(xué)科應(yīng)用集成能力。
開放式機器人控制與仿真實驗室能在三個層級配合教學(xué)過程實現(xiàn)遞進(jìn)式的培養(yǎng):
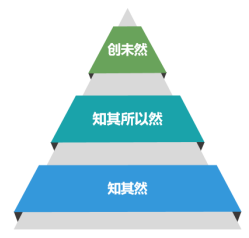
層級一是認(rèn)知和使用層面的“知其然”,可以分階段的了解和學(xué)習(xí)工業(yè)機器人和智能制造系統(tǒng)的使用過程;
層級二是理論體系建立層面的“知其所以然”,可以了解與自己探索與使用過程相關(guān)的底層原理和算法;
層級三是在掌握了應(yīng)用現(xiàn)狀和對應(yīng)現(xiàn)狀的內(nèi)在原理后, 面向未來需求的“創(chuàng)未然”。
以工業(yè)機器人方向為例,可以在通過多個階段,實現(xiàn)多層級的學(xué)習(xí)迭代。在層級一層面,首先通過典型的機器人工作站,來建立對工業(yè)機器人的基本認(rèn)知,學(xué)習(xí)了解機器人示教編程的過程;緊跟層級一的這個過程,通過深度開放的基于國產(chǎn)機器人的教學(xué)系統(tǒng),使用 Matlab/Simulink 軟件,學(xué)習(xí)機器人運動學(xué)、動力學(xué)和機器人控制系統(tǒng)的基本原理,自己實現(xiàn)相關(guān)核心算法和進(jìn)行仿真,并部署在實際機器人控制器中實時運行,控制真實的工業(yè)機器人本體并觀察分析控制效果,實現(xiàn)層級二的知其所以然。而后,可以通過與科研、競賽以及研究生培養(yǎng)等工作相結(jié)合的方式,進(jìn)一步針對高速精密運動或者精確力控或者精準(zhǔn)視覺引導(dǎo)等方面的需求,進(jìn)一步提出創(chuàng)新算法,實現(xiàn)科研層面的融合再創(chuàng)新。
基于機器人專業(yè)交叉性、融合型的學(xué)科特點,專業(yè)實驗室的建設(shè)也需要從多個維度進(jìn)行構(gòu)建。開放式機器人控制與仿真實驗室的建設(shè)以前沿技術(shù)集成為內(nèi)驅(qū)力,打破學(xué)科專業(yè)限制,推進(jìn)學(xué)科優(yōu)勢交叉融合,實施理工結(jié)合、工工交叉、工文滲透、工藝聯(lián)合等不同學(xué)科、專業(yè)交叉融合,完善新工科交叉融合模式下“學(xué)科基礎(chǔ)+跨學(xué)科交叉專業(yè)+前沿技術(shù)+實踐驅(qū)動+創(chuàng)新創(chuàng)業(yè)”復(fù)合型人才知識、能力結(jié)構(gòu)。
開放式機器人控制與仿真實驗室擬結(jié)合機器人工程及先進(jìn)前沿技術(shù)專業(yè)建設(shè)及人才培養(yǎng)目標(biāo)要求,重點圍繞《機器人驅(qū)動與控制技術(shù)》《機器人基礎(chǔ)》《機器人原理與機構(gòu)設(shè)計》《機器視覺與人機交互》《機器人運動控制》《機器人仿真技術(shù)》《機器人工程基礎(chǔ)實踐》等課程建設(shè)及項目開發(fā)、算法驗證、學(xué)科競賽等創(chuàng)新創(chuàng)業(yè)實踐活動,為學(xué)生提供認(rèn)知、理解、掌握、運用的閉環(huán)學(xué)習(xí)過程。
1、機器人的系統(tǒng)認(rèn)知方面:本方案以典型的六軸工業(yè)機器人為學(xué)習(xí)對象,可快速幫助學(xué)生了解機器人的系統(tǒng)組成、結(jié)構(gòu)認(rèn)知、常規(guī)使用等方面的知識;
2、機器人基礎(chǔ)與原理教學(xué)方面:本方案提供的機器人半實物仿真控制平臺以機器人快速原型控制系統(tǒng)和機器人開發(fā)軟件為基礎(chǔ),可以完成 DH 建模、機器人正逆運動學(xué)、關(guān)節(jié)空間規(guī)劃、笛卡爾空間規(guī)劃、雅克比矩陣、動力學(xué)辨識等機器人學(xué)相關(guān)實驗課程;
3、機器人實踐實操方面:本方案提供的機器人數(shù)字孿生仿真系統(tǒng)、開放式機器人綜合科教實訓(xùn)平臺,既能滿足機器人學(xué)相關(guān)原理及底層控制實驗,又可以完成產(chǎn)品的分揀、組裝、加工、視覺檢測等典型的應(yīng)用實訓(xùn)場景。
4、機器人科研創(chuàng)新方面:本方案提供的開放式機器人綜合科教實訓(xùn)平臺,底層深度開放,可以實現(xiàn)與機器人廠家控制系統(tǒng)設(shè)計人員相當(dāng)?shù)淖畹讓涌刂茩?quán)限,可以支撐機器人高級控制功能,如基于動力學(xué)的阻抗控制、多機間協(xié)同力控制等;
020-82313220

